विषयसूची:
- चरण 1: परियोजना के लिए सामग्री
- चरण 2: भाग 1: लेखक के लिए लाइनर मोशन बनाना
- चरण 3: भाग 2: लेखक प्रमुख (ऊपर और नीचे गति)
- चरण 4: भाग 3: पेपर रोलर
- चरण 5: भाग 4: ब्लूटूथ मॉड्यूल एकीकरण
- चरण ६: भाग ५: सभी को इकट्ठा करें
- चरण 7: सर्किट को कॉम्पैक्ट बनाएं
- चरण 8: ब्रेल प्रिंट करें
: 8 कदम (चित्रों के साथ)")
वीडियो: सरल ब्रेल लेखक (भाषण से ब्रेल): 8 कदम (चित्रों के साथ)
: 8 कदम (चित्रों के साथ)")
2024 लेखक: John Day | [email protected]. अंतिम बार संशोधित: 2024-01-30 09:22


सभी को नमस्कार, यह सब एक साधारण XY प्लॉटर को सफलतापूर्वक पूरा करने के बाद शुरू हुआ, मैंने ब्रेल टेक्स्ट कनवर्टर के लिए एक सरल भाषण विकसित करने के बारे में सोचा। मैंने इसे ऑनलाइन खोजना शुरू कर दिया और अप्रत्याशित रूप से कीमतें बहुत अधिक थीं, जिसने मुझे एक छोटा पोर्टेबल और सस्ता लेखक बनाया।
जैसा कि हम जानते हैं कि हम जो कुछ भी बनाने के बारे में सोचते हैं, वह मौजूद हो सकता है या कम से कम किसी के द्वारा प्रयास किया जा सकता है, इसलिए मैंने ऐसी लेखन मशीन की तलाश शुरू कर दी। मुझे एक वीडियो मिला जहां यह काफी बड़ा और शोर था, इसलिए मैंने अपना स्वाद डालने का सोचा जो छोटा पोर्टेबल और उपयोग में आसान है।
ईमानदारी से मैं Arduino के लिए नया हूं और अभी भी इसे सीख रहा हूं। मैं सफलतापूर्वक एक XY प्लॉटर बनाने में सक्षम हूं ताकि उस समय मेरी आशाएं उसी ज्ञान के साथ अधिक हों, मैं अपने छोटे ब्रेल लेखक को बाहर निकालने में सक्षम हो सकूं। इसलिए इस प्रक्रिया में मैंने सीखा है बहुत कुछ और मैं अंत में इसे केवल 2 सप्ताह के समय में विकसित करने में सक्षम हो गया।
तो यहाँ यह बताया गया है कि एक साधारण ब्रेल लेखक कैसे बनाया जाता है।
चरण 1: परियोजना के लिए सामग्री
- अरुडिनो नैनो
- A4988 स्टेपर ड्राइवर
- ब्लूटूथ सीरियल ट्रांसीवर मॉड्यूल
- सीडी ड्राइव स्टेपर मोटर स्लाइडर रैखिक गाइड माइक्रो
- 2 टुकड़ा 360 डिग्री रोटेशन सर्वो मोटर
- 1 टुकड़ा 180 डिग्री सर्वो मोटर
- इंजेक्शन सिरिंज का 2 टुकड़ा (दवा की दुकान में)
- स्पष्ट एक्रिलिक शीट का 1 टुकड़ा
- डबल पक्षीय फोम टेप
- फेवी क्विक
- नर-मादा जम्पर तार
- काटने के उपकरण और पेचकश सेट।
- जेल / बॉल पेन
- ब्लूटूथ सुविधा वाला मोबाइल फोन
- एपीपी: अरुडिनो वॉयस कंट्रोल
अब हम इसे बनाते हैं
-
कुल परियोजना को 4 छोटे भागों में विभाजित किया जा सकता है
- लाइनर मॉड्यूल सेटअप (A4988 ड्राइवर का उपयोग करके)
- लेखक के सिर के लिए ऊपर और नीचे गति बनाना
- पेपर रोलिंग के लिए रोलर
- ब्लूटूथ एकीकरण
- अंत में उन सभी भागों को इकट्ठा करने की आवश्यकता है जो परियोजना को पूरा करने के लिए प्रेरित करेंगे।
चरण 2: भाग 1: लेखक के लिए लाइनर मोशन बनाना

कागज में सामग्री लिखने के लिए हमें इधर-उधर जाने की जरूरत है। विभिन्न तरीकों का उपयोग करके ऐसी यांत्रिक गति बनाने के लिए बहुत सारे वीडियो हैं। लेकिन स्टेपर मोटर का उपयोग करके हम इसे उच्च सटीकता के साथ बहुत आसानी से कर सकते हैं।
तो यांत्रिक सामान निर्माण से बचने के लिए मैंने स्टेपर मोटर का उपयोग किया जो एक स्लाइडर के साथ आ रहा है, आप इसे स्वयं बना सकते हैं, यदि आप अपना खुद का निर्माण करना चाहते हैं तो आप इस लिंक का अनुसरण कर सकते हैं।
एक बार यांत्रिक भाग हो जाने के बाद हमें विद्युत विन्यास करने के लिए चरणों का पालन करना होगा
- छवि का पालन करें सर्किट विन्यास करते हैं।
-
जरूर लगाएं
- पिन 6: सक्षम करें
- पिन 5: चरण
- पिन 4: दिशा
- अपने Arduino नैनो में basicMove2 का कोड अपलोड करें और सीरियल मॉनिटर खोलें और अग्रेषण के लिए "f" का उपयोग करें और "b" पीछे की ओर और अपने सर्किट का परीक्षण करें। जांचें कि क्या आप उचित रैखिक गति प्राप्त करने में सक्षम हैं या सटीकता के साथ नहीं।
- आप कमांड की तरह fbfbffbbfffbbb की श्रृंखला का भी उपयोग कर सकते हैं।
चरण 3: भाग 2: लेखक प्रमुख (ऊपर और नीचे गति)
")
")
")
")
अप और डाउन मोशन करने के अलग-अलग तरीके हैं। आप इसे सोलनॉइड एक्ट्यूएटर का उपयोग करके कर सकते हैं। लेकिन यहाँ मैं इसके लिए एक सर्वो मोटर की मदद से एक साधारण पेन का उपयोग कर रहा हूँ।
- हटाने योग्य रिफिल वाला कोई भी साधारण बॉल पेन लें।
- रिफिल को अंदर धकेलने के बाद ऊपर में एक छेद बनाएं, सुनिश्चित करें कि आपका छेद पेन के दोनों किनारों से होकर जाना चाहिए और फिर से भरना चाहिए।
- रिफिल में एक और छेद बनाएं और उसमें एक स्ट्रिंग संलग्न करें।
- रिफिल को वापस रखें, और रिफाइल होल के नीचे पेन में एक छेद बनाएं, इसे रिफाइल से कम से कम 2-3 सेमी नीचे करना सुनिश्चित करें।
- अब पेन और रिफाइल के जरिए ऊपर से इलास्टिक रबर बांधें।
- 180 डिग्री सर्वो मोटर का उपयोग करें, और इसे 0 डिग्री पर सेट करें और स्ट्रिंग को नोब से जोड़ दें।
- अब जब नोब वामावर्त 180 घुमाता है, तो रिफिल को बाहर निकाला जाएगा और जब यह शीर्ष पर इलास्टिक बैंड के कारण 0 डिग्री पर वापस आ जाएगा तो यह वापस अंदर चला जाएगा।
- Arduino नैनो में नंबर 8 को पिन करने के लिए सिग्नल पिन संलग्न करें।
- अपने Arduino नैनो में basicMove2 का कोड अपलोड करें और सीरियल मॉनिटर खोलें और "n" का उपयोग करें और अपने सर्किट का परीक्षण करें।
- आप nnnnnnnnnn कमांड की श्रृंखला का भी उपयोग कर सकते हैं, और जांच सकते हैं कि यह काम कर रहा है या नहीं।
- इच्छा गति प्राप्त करने के लिए घटते घूर्णन कोण को बढ़ाएं।
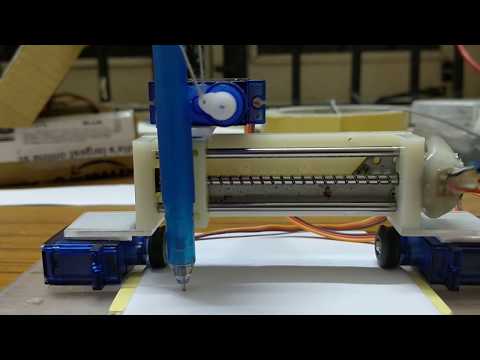
चरण 4: भाग 3: पेपर रोलर



अब पेपर रोलर, यह सबसे दिलचस्प और चुनौतीपूर्ण हिस्सा है।
- इंजेक्शन सिरिंज रबर निकालें।
- प्लास्टिक गियर को सर्कल में काटें।
- इसे रबर में डालें और थोड़ा गोंद लगाएं।
- इसे सर्वो संलग्न करें और इसे गोंद से सुरक्षित करें।
- ऊपर जैसा दूसरा बनाएं।
- Arduino नैनो में नंबर 9 और 10 को पिन करने के लिए सिग्नल पिन संलग्न करें।
- अपने Arduino नैनो में basicMove2 का कोड अपलोड करें और सीरियल मॉनिटर खोलें और "p" का उपयोग करें और अपने सर्किट का परीक्षण करें।
- आप pppppppppp कमांड की श्रृंखला का भी उपयोग कर सकते हैं, और जांच सकते हैं कि यह काम कर रहा है या नहीं।
- वांछित गति प्राप्त करने के लिए रोटेशन कोण घटाएं।
- सर्वो के अंदर मौजूद पोटेंशियोमीटर को बदलकर गति को समायोजित करने का प्रयास करें।
- रोटेशन को एक ही दिशा और गति में करें (यह सबसे महत्वपूर्ण और थकाऊ काम है)।
चरण 5: भाग 4: ब्लूटूथ मॉड्यूल एकीकरण

यह हिस्सा सबसे आसान हिस्सा है।
- उपरोक्त सर्किट कॉन्फ़िगरेशन करें और यह हो गया है।
- यह आपको Arduino Voice Control का उपयोग करके वॉयस कमांड भेजने में मदद करेगा।
- आप Google में "Arduino ब्लूटूथ मॉड्यूल hc-05" खोज सकते हैं, आपको अच्छे उदाहरण मिलेंगे।
चरण ६: भाग ५: सभी को इकट्ठा करें



आइए अब हम अपने चारों भागों को इकट्ठा करें।
- चादर साफ करो।
- डबल टेप का उपयोग करते हुए, सर्वोस मोटर जोड़ें जैसा कि चित्र में दिखाया गया है।
- रैखिक स्लाइडर पर अतिरिक्त प्लास्टिक का टुकड़ा संलग्न करें और इसे दो सर्वो के ऊपर रखें।
- इसे पेपर रोलर के समानांतर रखना सुनिश्चित करें।
- अब पेन हेड संलग्न करें, सुनिश्चित करें कि यह सतह को नहीं छूना चाहिए और सर्वो रोटेशन पर इसे टेप पर एक छेद पंच करना चाहिए।
- पिन Arduino नैनो संलग्न करें।
- अपने Arduino नैनो में basicMove2 का कोड अपलोड करें।
-
सीरियल मॉनिटर खोलें और सभी कमांड जांचें
- च अग्रेषण के लिए
- बी पीठ के लिए
- पेपर रोलिंग के लिए पी
- n पेन को ऊपर और नीचे ले जाने के लिए।
- एक बार सभी फ़ंक्शन सत्यापित हो जाने के बाद अब यह ब्रेल प्रिंट करने के लिए तैयार है।
चरण 7: सर्किट को कॉम्पैक्ट बनाएं




एक छोटे और एकल ब्रेडबोर्ड में सर्किट बनाने के लिए छवि को प्रवाहित करें।
चरण 8: ब्रेल प्रिंट करें

- Brallie.ino फ़ाइल खोलें, Arduino IDE का सीरियल मॉनिटर खोलें।
- कागज को रोलिंग पेपर मोटर के नीचे रखें।
- कमांड में कुछ स्पेस यानी (" ") भेजें और एंटर पर क्लिक करें।
- कागज अंदर खिसक जाएगा।
- इसे तब तक करें जब तक यह लेखक के सिर को पार न कर दे।
- फिर आप अपना आदेश मॉनिटर में भेज सकते हैं, वास्तविक पाठ।
- आप ब्लूटूथ ऐप खोलें और ब्लूटूथ से कनेक्ट करें और वॉयस कमांड भेजें।
- ब्रेल भाषा देखने के लिए कागज को पलटें।
- मैंने हाय, हैलो और वेलकम जैसे कुछ शब्दों की कोशिश की, आप नमूना आउटपुट पेपर देख सकते हैं।
-
अपने लिए विशिष्ट परिणाम प्राप्त करने के लिए आप कोड में नीचे दिए गए मापदंडों को बदल सकते हैं।
- ब्रेल कॉलम के बीच गैप: int steps = 30;
- ब्रेल पहले दो बिंदुओं से अगली दो बिंदुओं वाली पंक्तियों के बीच लाइन गैप: int paperLine = 250;
- रैखिक स्लाइडर की गति: int stepperDelay = ५००;
- राइटर हेड की स्पीड: इंट सर्वोदेले = ५००;
- प्रति पंक्ति वर्णों की संख्या: int n = 10;
सिफारिश की:
MOLBED - मॉड्यूलर कम लागत वाली ब्रेल इलेक्ट्रॉनिक डिस्प्ले: 5 कदम (चित्रों के साथ)
")
MOLBED - मॉड्यूलर लो कॉस्ट ब्रेल इलेक्ट्रॉनिक डिस्प्ले: विवरण इस परियोजना का लक्ष्य एक इलेक्ट्रॉनिक ब्रेल सिस्टम बनाना है जो कि सस्ती हो और इस तकनीक को सभी के लिए उपलब्ध करा सके। प्रारंभिक मूल्यांकन के बाद, यह स्पष्ट हो गया था कि इस प्रकार व्यक्तिगत चरित्र की डिजाइन
रेट्रो भाषण संश्लेषण। भाग: १२ IoT, गृह स्वचालन: १२ कदम (चित्रों के साथ)
")
रेट्रो भाषण संश्लेषण। भाग: १२ IoT, होम ऑटोमेशन: यह लेख होम ऑटोमेशन इंस्ट्रक्शंस पर एक श्रृंखला में १२ वां है जो एक IoT रेट्रो स्पीच सिंथेसिस डिवाइस को मौजूदा होम ऑटोमेशन सिस्टम में बनाने और एकीकृत करने का दस्तावेजीकरण करता है, जिसमें टी को सक्षम करने के लिए सभी आवश्यक सॉफ़्टवेयर कार्यक्षमता शामिल हैं
कोक मशीन लेवल डिटेक्टर - अब भाषण के साथ!: 6 कदम (चित्रों के साथ)
")
कोक मशीन लेवल डिटेक्टर - नाउ विद स्पीच!: यह प्रोजेक्ट मेरे कोक मशीन कैन लेवल डिटेक्टर का रीमिक्स है, (https://www.instructables.com/id/Coke-Machine-Can-Level-Detector/) नए सेंसर के साथ , और बोली जाने वाली ध्वनि का जोड़! अपना पहला स्तर डिटेक्टर बनाने के बाद, मैंने जी में एक पीजो बजर जोड़ा
ब्रेल खगोल विज्ञान: 8 कदम (चित्रों के साथ)
")
ब्रेल एस्ट्रोनॉमी: मैं एस्ट्रोनॉमी / एस्ट्रोफोटोग्राफी की दुनिया को नेत्रहीनों और खराब देखने वालों के साथ साझा करना चाहता था। यह परियोजना कुछ आपूर्ति के साथ और सस्ते में एक साधारण फैशन में ऐसा करेगी
बबल टॉक: अपने भाषण को बुलबुले में बदलें!: 6 कदम (चित्रों के साथ)
")
बबल टॉक: टर्न योर स्पीच इन बबल्स !: "क्वोड, यूट डिकिटुर, सि इस्ट होमो बुल्ला, ईओ मैगिस सेनेक्स (यदि, जैसा कि वे कहते हैं, आदमी एक बुलबुला है, तो और भी एक बूढ़ा आदमी है)" - मार्कस टेरेंटियस Varro (116 BC - 27 BC), De Re Rustica साबुन का बुलबुला अल्पकालिक होता है। यह केवल एक संक्षिप्त क्षण के लिए रहता है और