विषयसूची:
- आपूर्ति
- चरण 1: 3डी प्रिंटर सेटिंग्स
- चरण 2: अपना खुद का ओटो DIY+ बनाएं
- चरण 3: कोड योर ओन ओटो
- चरण 4: ब्लूटूथ एपीपी के लिए मुख्य कोड
- चरण 5: कॉपी करें, विस्तृत करें, अनुकूलित करें, संशोधित करें, रीमिक्स करें और साझा करें
- चरण 6: ब्लूटूथ (बीटी) सेटअप (केवल अगर पेयरिंग सफल नहीं है):
")
वीडियो: ओटो DIY+ Arduino ब्लूटूथ रोबोट 3डी प्रिंट के लिए आसान: 6 कदम (चित्रों के साथ)
")
2024 लेखक: John Day | [email protected]. अंतिम बार संशोधित: 2024-01-30 09:19




वास्तव में ओटो की ओपन सोर्स प्रकृति खुली स्टीम शिक्षा की अनुमति देती है, हम दुनिया भर के विभिन्न कार्यशालाओं और स्कूलों से फीडबैक एकत्र करते हैं जो पहले से ही अपनी कक्षा में ओटो DIY का उपयोग कर रहे हैं और इस शैक्षिक स्थानों के खुलेपन के आधार पर हम पाठ सामग्री को व्यवस्थित करते हैं और साझा भी करते हैं।
CC-BY-SA क्रिएटिव कॉमन्स लाइसेंस इसका मतलब है कि आप मुफ्त में कॉपी कर सकते हैं लेकिन आपको हमारी वेबसाइट (https://www.ottodiy.com/) डालकर मूल को क्रेडिट देना होगा।
ओटो DIY + मूल #OttoDIY का उन्नत और उन्नत संस्करण है, विचार है कि समान आधार सुविधाएँ DIY रोबोट + ब्लूटूथ नियंत्रण और प्रोग्रामिंग + मेटल गियर सर्वो मोटर्स + रिचार्जेबल + टच सेंसर द्वारा बदलते मोड + साउंड सेंसर + लाइट मूव्स + अन्य आउटपुट +…?
रोमांचक हिस्सा यह है कि हम दुनिया भर के निर्माताओं और हैकर्स के साथ खुला विकास कर रहे हैं, इसलिए हम विचारों के लिए खुले हैं, न केवल उन विशेषज्ञों से जो आप हमारे साथ जुड़ सकते हैं, फीडबैक, सोशल शेयर, परीक्षण या कोई अन्य योगदान जो आप सोच सकते हैं।
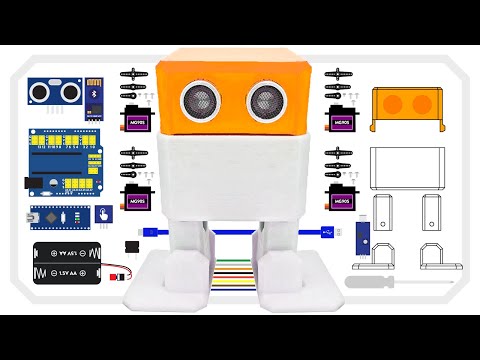
आपूर्ति
1 × अरुडिनो नैनो
1 × HC-06 या HC-05 ब्लूटूथ मॉड्यूल
1 × Arduino नैनो शील्ड I/O; आप एक मिनी ब्रेडबोर्ड का उपयोग कर सकते हैं लेकिन बहुत अधिक केबल कार्य
1 × USB-A से मिनी-USB केबल
4 × माइक्रो सर्वो MG90s (धातु)
1 × बजर
10 × महिला / महिला जम्पर तार
1 × टच सेंसर
1 × ध्वनि संवेदक
1 × 8x8mm माइक्रो स्विच सेल्फ लॉक ऑन/ऑफ
1 × 3.7 वी लीपो बैटरी बूस्टर के साथ 5 वी (वैकल्पिक) 1 × फिलिप्स स्क्रूड्राइवर 1 एक्स 3 डी प्रिंटर (या किसी सेवा या मित्र का उपयोग करें;))
चरण 1: 3डी प्रिंटर सेटिंग्स

एक द्विपाद रोबोट के निर्माण की मूल बातों से परिचित होने के लिए पहले ओटो DIY को पढ़ना महत्वपूर्ण है, यहां https://wikifactory.com/+OttoDIY/otto-diy- पर जाकर ब्लूटूथ के लिए सभी 3 डी प्रिंट एसटीएल भागों, कोड और लाइब्रेरी प्राप्त करें। प्लस फाइल टैब में
- PLA सामग्री के साथ FDM 3D प्रिंटर का उपयोग करने की अनुशंसा करें।
- समर्थन या राफ्ट की बिल्कुल भी आवश्यकता नहीं है।
- संकल्प: 0.15 मिमी
- घनत्व 20% भरें
आकार को समायोजित करने की आवश्यकता है कुछ परिवर्तन Autodesk Fusion 360. में किए गए स्रोत फ़ाइल का उपयोग करते हैं
या यहाँ टिंकरकाड
चरण 2: अपना खुद का ओटो DIY+ बनाएं



निम्नलिखित वीडियो और तस्वीरों में आप रोबोट डिजाइन के कुछ नए संस्करणों के कारण ओटो DIY+ बनाने के तरीके का संदर्भ ले सकते हैं।
चरण 3: कोड योर ओन ओटो





तो इस बिंदु तक आपके पास एक ओटो 3 डी प्रिंटेड, असेंबल होना चाहिए, अब आपके पीसी में लाइब्रेरी और Arduino स्थापित करने के लिए कुछ प्रोग्रामिंग होनी चाहिए।
अपने स्वयं के ओटो को कोड करना सबसे आसान है हमारे ब्लॉकली सॉफ़्टवेयर का उपयोग करके, अधिक उन्नत कोडर सीधे Arduino IDE को आज़मा सकते हैं।
चरण 4: ब्लूटूथ एपीपी के लिए मुख्य कोड




ओटो को ब्लूटूथ के माध्यम से कमांड प्राप्त करने के लिए तैयार रहने की जरूरत है और इसके लिए उसके दिमाग में मुख्य कोड डालने की जरूरत है
- Arduino IDE फ़ोल्डर में ओटो पुस्तकालयों की प्रतिलिपि बनाएँ
- Otto. पर APP.ino स्केच अपलोड करें
- अपने स्मार्टफोन में एपीपी डाउनलोड और इंस्टॉल करें। गूगल प्ले स्टोर (https://play.google.com/store/apps/details?id=com.ottodiy)
- अब आप मॉड्यूल को कनेक्ट कर सकते हैं और अपने फोन में ब्लूटूथ सक्षम कर सकते हैं।
- ओटो खोजें और ब्लूटूथ पता /नाम जोड़ें
- अब आप ओटो को नियंत्रित करने के लिए एपीपी का उपयोग कर सकते हैं!
- नई सुविधाओं के साथ खेलें और यदि आपको अपने बीटी को फिर से कॉन्फ़िगर करने की आवश्यकता नहीं है, लेकिन चिंता न करें यह भी आसान है;)
चरण 5: कॉपी करें, विस्तृत करें, अनुकूलित करें, संशोधित करें, रीमिक्स करें और साझा करें




अपने स्वयं के रोबोट को अनुकूलित करने के तरीके के बारे में विचार प्राप्त करने के लिए इस ब्लॉग पोस्ट को देखें
ओटो बिल्डर समुदाय में शामिल हों! हमारा अनुसरण करें, हमें एक लाइक दें और अपनी रचनात्मकता साझा करें, आपको अपने रोबोट को किसी भी सोशल मीडिया में साझा करके यहां चित्रित किया जा सकता है
फेसबुक और इंस्टाग्राम
अपनी पोस्ट और टैग में हैशटैग #ottodiy का उपयोग करें या @OttoDIY. का उल्लेख करें
रोबोट बनाने वालों, शिक्षकों और निर्माताओं के इस मित्रवत समुदाय का हिस्सा बनें! यहां हमारे साथ जुड़कर हमारे ओटो बिल्डर समुदाय में आपका स्वागत है!
चरण 6: ब्लूटूथ (बीटी) सेटअप (केवल अगर पेयरिंग सफल नहीं है):
यह सेटअप केवल उन मॉड्यूल के लिए आवश्यक है जो 9600 की मानक बॉड दर के साथ नहीं आते हैं, कैसे पता करें? बस पहले कोड और एपीपी आज़माएं, अगर फोन ओटो के साथ नहीं जुड़ता है या कमांड का जवाब नहीं देता है, तो शायद इसका मतलब है कि आपका मॉड्यूल एक अलग बॉड दर में है इसलिए कॉन्फ़िगर करने की आवश्यकता है
बीटी कोड में 115200 बॉड-रेट है इसलिए बीटी मॉड्यूल को उस गति से मेल खाना चाहिए जो सीरियल इंटरफेस (यूएआरटी) के माध्यम से Arduino नैनो के साथ संचार करने में सक्षम हो।
एचसी-05 के लिए: 38400 या 115200
1. पहले अपने नैनो में स्केच HC05_BT_config.ino अपलोड करें, फिर नैनो को USB से डिस्कनेक्ट करें।
2. अब बीटी को अरुडिनो नैनो से कनेक्ट करें जैसा कि आरेख में दिखाया गया है लेकिन वीसीसी को कनेक्ट न करें।
TX - RX
आरएक्स - TX
वीसीसी - 5वी
जीएनडी - जीएनडी
3. यूएसबी को नैनो में प्लग करें और फिर वीसीसी को कनेक्ट करें ताकि बीटी एटी मोड में प्रवेश करे। बीटी पर एलईडी धीमी गति से झपकना शुरू कर देना चाहिए, लगभग हर 2 सेकंड में एक बार। (यदि यह काम नहीं करता है, तो वीसीसी कनेक्ट करते समय बीटी मॉड्यूल पर बटन दबाए रखने का प्रयास करें)।
IDE में सीरियल मॉनिटर खोलें, बॉड-रेट को 9600 पर सेट करें और लाइन एंडिंग को NL और CR दोनों पर सेट करें।
एटी टाइप करें फिर एंटर दबाएं; (यदि सब कुछ सही है, तो बीटी को ओके के साथ जवाब देना चाहिए और फिर निम्नलिखित कमांड दर्ज करना चाहिए:
AT+NAME=Zowi "नाम निर्धारित करना"
एटी+पीएसडब्ल्यूडी=1234 "पासवर्ड जोड़ना"
AT+UART=115200, 1, 0 "बॉड दर"
AT+POLAR=1, 0 "BT पर arduino प्रोग्रामिंग के लिए रीसेट के रूप में उपयोग किए जाने वाले STATE पिन को सक्षम करना"
अब एपीपी स्टेप पर जाएं
यदि कोई समस्या इस निर्देश की जाँच करती है कि AT कमांड्स का उपयोग करके HC-05 ब्लूटूथ मॉड्यूल डिफॉल्ट्स को कैसे संशोधित किया जाए
www.instructables.com/id/Modify-The-HC-05-…
HC-06 के लिए: 9600 या 115200
एचसी-06 बीटी मॉड्यूल के लिए चीजें थोड़ी सरल हैं क्योंकि मॉड्यूल हमेशा एटी कमांड मोड में होता है जब किसी चीज से जुड़ा नहीं होता है। लेकिन नकारात्मक पक्ष यह है कि HC-06 मॉड्यूल का उपयोग Arduino पर स्केच अपलोड करने के लिए नहीं किया जा सकता है क्योंकि इसमें रीसेट नहीं होता है। मॉड्यूल को कॉन्फ़िगर करने के लिए
1. इस स्केच HC06_BT_config.ino को अपने नैनो में अपलोड करें
1. यूएसबी डिस्कनेक्ट करें
2. BT मॉड्यूल को Arduino Nano से इस तरह कनेक्ट करें:
TX - RX
आरएक्स - TX
वीसीसी - 5वी
जीएनडी - जीएनडी
3. अपने नैनो को चालू करें और लगभग 10-15 सेकंड के बाद सब कुछ समाप्त हो जाना चाहिए और आपका बीटी कॉन्फ़िगर किया जाना चाहिए (LED13 ब्लिंक करना शुरू कर देना चाहिए)।
यदि कोई समस्या है तो इस निर्देश योग्य
यदि कोई प्रश्न है, तो मुझे नई टिप्पणियों के निर्देश द्वारा सूचनाएं नहीं मिलती हैं, इसलिए यदि कुछ भी हो तो कृपया हमारे समुदाय में पोस्ट करें
सिफारिश की:
SMARS रोबोट कैसे बनाएं - Arduino स्मार्ट रोबोट टैंक ब्लूटूथ: 16 कदम (चित्रों के साथ)
")
SMARS रोबोट कैसे बनाएं - Arduino स्मार्ट रोबोट टैंक ब्लूटूथ: यह लेख PCBWAY द्वारा गर्व से प्रायोजित है। PCBWAY दुनिया भर के लोगों के लिए उच्च गुणवत्ता वाले प्रोटोटाइप PCB बनाता है। इसे अपने लिए आजमाएं और बहुत अच्छी गुणवत्ता के साथ PCBWAY पर मात्र $5 में 10 PCB प्राप्त करें, धन्यवाद PCBWAY। Arduino Uno के लिए मोटर शील्ड
3डी प्रिंटर और Arduino/#smartcreativity के बिना एक डांसिंग रोबोट बनाएं: 11 कदम (चित्रों के साथ)
")
3डी प्रिंटर और Arduino/#smartcreativity के बिना एक डांसिंग रोबोट बनाएं: नमस्कार दोस्तों, इस ट्यूटोरियल में मैं आपको दिखाऊंगा कि बिना 3D प्रिंटर और बिना Arduino के घर पर डांसिंग रोबोट कैसे बनाया जाता है। यह रोबोट डांस, ऑटो बैलेंसिंग, म्यूजिक प्रोडक्शन और वॉकिंग में सक्षम है। और रोबोट का डिजाइन भी बहुत अच्छा लग रहा है
OAREEE - 3D Printed - Arduino के साथ इंजीनियरिंग शिक्षा (OAREE) के लिए बाधा से बचने वाला रोबोट: 5 कदम (चित्रों के साथ)
 के लिए बाधा से बचने वाला रोबोट: 5 कदम (चित्रों के साथ)")
OAREE - 3D Printed - Arduino के साथ इंजीनियरिंग शिक्षा के लिए बाधा से बचने वाला रोबोट (OAREE): OAREE (इंजीनियरिंग शिक्षा के लिए बाधा से बचने वाला रोबोट) डिज़ाइन: इस निर्देश का लक्ष्य एक OAR (बाधा से बचने वाला रोबोट) रोबोट डिज़ाइन करना था जो सरल / कॉम्पैक्ट था, 3 डी प्रिंट करने योग्य, इकट्ठा करने में आसान, मूवम के लिए निरंतर रोटेशन सर्वो का उपयोग करता है
ब्लूटूथ मॉड्यूल और ऑटोनॉमस रोबोट मूवमेंट का उपयोग करके वॉयस द्वारा नियंत्रित दूरी, दिशा और रोटेशन की डिग्री (पूर्व, पश्चिम, उत्तर, दक्षिण) के साथ Arduino रोबोट।: 6 कदम
 के साथ Arduino रोबोट।: 6 कदम")
ब्लूटूथ मॉड्यूल और ऑटोनॉमस रोबोट मूवमेंट का उपयोग करके वॉयस द्वारा नियंत्रित दूरी, दिशा और रोटेशन की डिग्री (पूर्व, पश्चिम, उत्तर, दक्षिण) के साथ Arduino रोबोट: यह निर्देश योग्य बताता है कि Arduino रोबोट कैसे बनाया जाए जिसे आवश्यक दिशा में ले जाया जा सकता है (आगे, पीछे) , बाएँ, दाएँ, पूर्व, पश्चिम, उत्तर, दक्षिण) को वॉयस कमांड का उपयोग करके सेंटीमीटर में दूरी की आवश्यकता होती है। रोबोट को स्वायत्त रूप से भी स्थानांतरित किया जा सकता है
[Arduino रोबोट] मोशन कैप्चर रोबोट कैसे बनाएं - थम्स रोबोट - सर्वो मोटर - स्रोत कोड: 26 कदम (चित्रों के साथ)
![[Arduino रोबोट] मोशन कैप्चर रोबोट कैसे बनाएं - थम्स रोबोट - सर्वो मोटर - स्रोत कोड: 26 कदम (चित्रों के साथ)](https://i.howwhatproduce.com/images/001/image-1599-93-j.webp "[Arduino रोबोट] मोशन कैप्चर रोबोट कैसे बनाएं - थम्स रोबोट - सर्वो मोटर - स्रोत कोड: 26 कदम (चित्रों के साथ)")
[Arduino रोबोट] मोशन कैप्चर रोबोट कैसे बनाएं | थम्स रोबोट | सर्वो मोटर | स्रोत कोड: अंगूठे रोबोट। MG90S सर्वो मोटर के एक पोटेंशियोमीटर का इस्तेमाल किया। यह बहुत मजेदार और आसान है! कोड बहुत सरल है। यह केवल 30 पंक्तियों के आसपास है। यह एक मोशन-कैप्चर जैसा दिखता है। कृपया कोई प्रश्न या प्रतिक्रिया छोड़ें! [निर्देश] स्रोत कोड https://github.c