विषयसूची:
- चरण 1: चरण 2: आंखों को रंगना
- चरण 2: चरण 3: आधार को एक साथ रखना
- चरण 3: चरण 4: सर्वो और लिंकेज रखना
- चरण 4: कोड चरण
- चरण 5: चरण 5: सिर
: 5 कदम")
वीडियो: सर्वो मोटर्स के साथ एनिमेट्रोनिक आंखें (Arduino): 5 कदम
: 5 कदम")
2024 लेखक: John Day | [email protected]. अंतिम बार संशोधित: 2024-01-30 09:22


एक नए प्रोजेक्ट में आपका स्वागत है!!!
पहली चीजें पहले मैं वास्तव में कुछ खौफनाक आंखें करना चाहता था जैसे वे वेशभूषा और हैलोवीन के लिए करते हैं। मुझे विशेष प्रभाव पसंद हैं और मैं एक आर्डिनो, सर्वो और पिंग पोंग गेंदों का उपयोग करके अपनी खुद की एनिमेट्रोनिक आंखें सीखना और बनाना चाहता था।
चरण 1:
आपूर्ति इकट्ठा करो …
2 सर्वो मोटर्स (मैं हॉबी टाउन स्टोर में सबसे सस्ते संभव के साथ गया था)
arduino uno (adafruit)
लिंकेज रॉड्स (हॉबी टाउन)
2 आधा शाफ्ट (हॉबी टाउन)
2 पिंग पोंग बॉल्स
कनेक्टर्स (हॉबी टाउन)
स्टायरोफोम हेड (माइकल्स)
अन्य विविध आइटम…
चरण 1: चरण 2: आंखों को रंगना


चरण 2 के लिए मैं आगे बढ़ना चाहता था और नेत्रगोलक को पेंट करना चाहता था जो मैंने स्वयं किया था। हाँ वे थोड़े दूर हैं लेकिन दूर से वे बहुत अच्छे लगते हैं! यदि आपके पास कोई प्रश्न है कि मैंने किस पेंट का उपयोग किया है तो नीचे टिप्पणी करें और पूछें:)
आंखें बनाना:
सामग्री की जरूरत:
4 छोटे पतले पेंट ब्रश
रंग
पेपर तौलिया
आंखें बनाने के लिए आप दो पिंग पोंग गेंदों से शुरू करें और ईमानदारी से उन्हें एक सटीक चाकू या बॉक्स कटर से आधा काट लें। इसके बाद किसी भी खामियों को छिपाने के लिए पहले उन्हें सफेद आधार से पेंट करें। इसके बाद आप किस रंग की आंख को पूरा करने की कोशिश कर रहे हैं, इसे लेयर करना शुरू करें। मेरे लिए मैंने हरे और नीले रंग का इस्तेमाल किया। मेरा रंग पैलेट हरा, नीला, सफेद और काला था।
चरण 2: चरण 3: आधार को एक साथ रखना


चरण 3: आधार को एक साथ रखना
सामग्री की जरूरत:
एक्रिलिक शीट
धातु का यादृच्छिक टुकड़ा
शिकंजा
आधा शाफ्ट
बैंड देखा (आवश्यक नहीं)
पहले मैंने एक ऐक्रेलिक शीट से अपने इच्छित आकार और आकार को काट दिया। फिर मैंने धातु के एक टुकड़े से धातु के कोष्ठक को काट दिया। एक बार जब मुझे वे मिल गए जहां मैं उन्हें चाहता था, तो मैंने शिकंजा के लिए छेद ड्रिल किया और कोष्ठक को आधार से जोड़ा जैसा कि छवि में ऊपर दिखाया गया है। मेरे एक सर्वोस के लिए मुझे यह सुनिश्चित करने के लिए एक छोटा आयत आकार काटना पड़ा कि यह वहाँ नीचे फिट हो। यह सुनिश्चित करने के लिए था कि लिंकेज और सब कुछ ठीक से संरेखित हो।
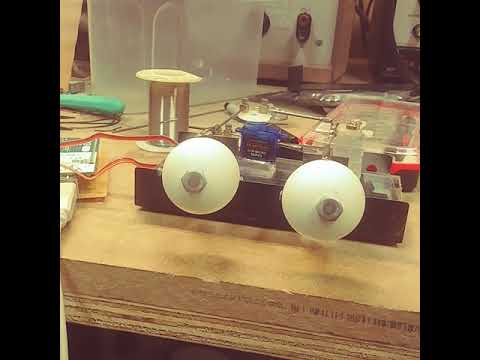
चरण 3: चरण 4: सर्वो और लिंकेज रखना



चरण 4: सर्वो और लिंकेज रखना
सामग्री की जरूरत:
2 सर्वोस
लिंकेज
छोटे कट एक्रिलिक वर्ग
शिकंजा
कनेक्टर्स
चरण 4 के लिए मैंने वहां रखा जहां सब कुछ जा रहा है और इसे बाहर रखा है। यह सुनिश्चित करने के लिए कि सब कुछ समान रूप से बैठा है और सिखाया जाता है कि मुझे एक सर्वो के नीचे ऐक्रेलिक के छोटे कटे हुए टुकड़े रखने होंगे। मुझे आंख को सर्वो से जोड़ने वाले लिंकेज के नीचे समान मात्रा में टुकड़े डालने थे। इन सभी जगहों और गोंद के बाद (जो भी आपकी पसंद हो सकती है जब तक वह चिपक जाती है) आप आंखों को लिंक और सर्वो से जोड़ सकते हैं। इसका एक क्लोज अप ऊपर इमेज 4 में दिखाया गया है। सर्वो को रखते समय बस एक साइड नोट और सर्वो को आंखों के सबसे करीब लिंक करना होता है और साथ ही इसके ठीक बगल में लिंक को भी ऊपर उठाना होता है। ऐसा इसलिए है क्योंकि एक x-अक्ष पर खींचता है और दूसरा y-अक्ष पर खींचता है। यह सबसे बड़ा कदम है और सब कुछ जोड़ने के बाद भी कुछ चीजों को बदलने की आवश्यकता हो सकती है।:)
चरण 4: कोड चरण


कोड को Arduino में जोड़ना !! ऊपर इन आंखों के लिए उपयोग किए गए कोड की छवियां हैं। मैंने एक PS1 नियंत्रक से जॉयस्टिक पर जोड़ा जिस तरह से आंखों को नियंत्रित किया जाता है।
चरण 5: चरण 5: सिर




यह कदम वैकल्पिक है और इसमें समय लगता है।
चरण 5: सिर बनाना
सामग्री की जरूरत
स्टायरोफोम सिर
एक्सएकटो चाकू
गर्म गोंद वाली बंदूक
अब इस चरण के लिए यह वैकल्पिक है और इसमें समय लगता है। शायद मुझे 2 घंटे लगे। दुर्भाग्य से अपराध में मेरे साथी ने गलती से परियोजना को छोड़ दिया और मेरे काम करने के बाद सिर तोड़ दिया। वैसे भी इसके लिए मैंने अभी यह पता लगाया है कि मुझे नीचे और साथ ही ऊपर से कितनी गहराई तक काटने की जरूरत है। सबसे महत्वपूर्ण हिस्सा आंखें हैं जिन्हें घूमने और एक सर्कल में जाने के लिए पर्याप्त जगह की आवश्यकता होती है, जैसा कि आप फोटो 5 में देख सकते हैं। ऐक्रेलिक बेस जो मैं करने के लिए चुनता हूं वह किनारे से चिपक जाता है जैसा कि आप फोटो 6 में देख सकते हैं। इसे इयर मफ्स की तरह कवर किया जा सकता है या आपके लिए विग की तरह कुछ मज़ेदार!
फिर तड़दा !!!!!!! आप इस परियोजना के साथ पूरी तरह से कर चुके हैं।
आशा है कि आपको यह पसंद आया होगा और यदि आपके कोई प्रश्न या कुछ भी पूछना है तो नीचे टिप्पणी करें:)
सिफारिश की:
Arduino एकाधिक सर्वो मोटर्स को कैसे कनेक्ट करें - PCA9685 ट्यूटोरियल: 6 चरण

Arduino मल्टीपल सर्वो मोटर्स को कैसे कनेक्ट करें - PCA9685 ट्यूटोरियल: इस ट्यूटोरियल में हम सीखेंगे कि PCA9685 मॉड्यूल और arduino का उपयोग करके कई सर्वो मोटर्स को कैसे कनेक्ट किया जाए। PCA9685 मॉड्यूल बहुत अच्छा है जब आपको कई मोटर्स कनेक्ट करने की आवश्यकता होती है, आप इसके बारे में अधिक पढ़ सकते हैं https ://www.adafruit.com/product/815Vi देखें
मोटो का उपयोग करके सर्वो मोटर्स को कैसे चलाएं: माइक्रो के साथ बिट: बिट: 7 कदम (चित्रों के साथ)
")
मोटो का उपयोग करके सर्वो मोटर्स को कैसे चलाएं: माइक्रो के साथ बिट: माइक्रो: बिट की कार्यक्षमता को बढ़ाने का एक तरीका है मोटो: बिट नामक बोर्ड का उपयोग स्पार्कफुन इलेक्ट्रॉनिक्स (लगभग $ 15-20) द्वारा। यह जटिल दिखता है और इसमें कई विशेषताएं हैं, लेकिन इससे सर्वो मोटर्स को चलाना मुश्किल नहीं है। मोटो: बिट आपको
रिमोट कंट्रोल के साथ एनिमेट्रोनिक आंखें: 5 कदम

रिमोट कंट्रोल के साथ एनिमेट्रोनिक आंखें: यह एक निर्देश है कि एनिमेट्रोनिक आंखें कैसे बनाई जाती हैं जिन्हें वाईफाई पर कंप्यूटर से दूरस्थ रूप से नियंत्रित किया जा सकता है। यह न्यूनतम इलेक्ट्रॉनिक घटकों का उपयोग करता है, कोई पीसीबी नहीं, और न्यूनतम सोल्डरिंग की आवश्यकता होती है। आप इसे पीसी कीबोर्ड से नियंत्रित कर सकते हैं, इसलिए आपको ई
3 पोटेंशियोमीटर और एक Arduino के साथ 3 सर्वो मोटर्स को नियंत्रित करना: 11 कदम (चित्रों के साथ)
")
3 पोटेंशियोमीटर और एक Arduino के साथ 3 सर्वो मोटर्स को नियंत्रित करना: नमस्ते। यह मेरा पहला निर्देश है, इसलिए मुझे आशा है कि यदि आप इसे स्थापित करने में कोई गलती करते हैं तो आप मेरे साथ धैर्य रखेंगे। यह शुरुआती लोगों के लिए लिखा गया है, इसलिए आप में से जो अधिक उन्नत हैं, वे इसमें से बहुत कुछ छोड़ सकते हैं और बस इसे तार-तार कर सकते हैं। लक्ष्य मैंने खुद को निर्धारित किया है
सर्वो मोटर्स का उपयोग करते हुए Arduino आधारित ह्यूमनॉइड रोबोट: 7 कदम (चित्रों के साथ)
")
सर्वो मोटर्स का उपयोग करते हुए Arduino आधारित ह्यूमनॉइड रोबोट: सभी को नमस्कार, यह मेरा पहला ह्यूमनॉइड रोबोट है, जिसे पीवीसी फोम शीट द्वारा बनाया गया है। यह विभिन्न मोटाई में उपलब्ध है। यहां, मैंने 0.5 मिमी का उपयोग किया। अभी यह रोबोट मेरे स्विच ऑन करने पर ही चल सकता है। अब मैं ब्लूटूथ के माध्यम से Arduino और Mobile को जोड़ने पर काम कर रहा हूं