विषयसूची:
- चरण 1: VPython और संपादक स्थापित करें
- चरण 2: कोड डाउनलोड करें और चलाएं
- चरण 3: इस सिम्युलेटर में अपने कार्यों को विकसित करें
- चरण 4: रियल स्पाइडर रोबोट को रिमोट कंट्रोल
![[vPython] स्पाइडर रोबोट सिम्युलेटर: ४ कदम](https://i.howwhatproduce.com/images/003/image-8663-22-j.webp "[vPython] स्पाइडर रोबोट सिम्युलेटर: ४ कदम")
वीडियो: [vPython] स्पाइडर रोबोट सिम्युलेटर: ४ कदम
![वीडियो: [vPython] स्पाइडर रोबोट सिम्युलेटर: ४ कदम](https://i.ytimg.com/vi/XRHa5Q4lob4/hqdefault.jpg "वीडियो: [vPython] स्पाइडर रोबोट सिम्युलेटर: ४ कदम")
2024 लेखक: John Day | [email protected]. अंतिम बार संशोधित: 2024-01-30 09:23


अगर आपको मेरा डिज़ाइन दिलचस्प लगता है, तो आप एक छोटा सा दान कर सकते हैं:https://paypal.me/RegisHsu
मैं अपने स्पाइडर रोबोट के लिए क्रियाओं का अनुकरण करने के लिए vPython का उपयोग कर रहा हूं। पीसी/मैक में अपनी खुद की रुचि क्रियाओं को विकसित करना आसान होगा, और फिर आर्डिनो को पोर्ट करना होगा।
यदि आप इसमें रुचि रखते हैं तो वास्तविक रोबोट निर्देश योग्य है
www.instructables.com/id/DIY-Spider-RobotQu…
VPython, Python प्रोग्रामिंग भाषा के साथ-साथ एक 3D ग्राफ़िक्स मॉड्यूल है जिसे "विज़ुअल" कहा जाता है, जिसे 2000 में David Scherer द्वारा उत्पन्न किया गया था। VPython ने नेविगेट करने योग्य 3D डिस्प्ले और एनिमेशन बनाना आसान बनाता है, यहां तक कि सीमित प्रोग्रामिंग अनुभव वाले लोगों के लिए भी। चूंकि यह पायथन पर आधारित है, इसलिए इसमें अनुभवी प्रोग्रामर और शोधकर्ताओं के लिए बहुत कुछ है।
चरण 1: VPython और संपादक स्थापित करें


अजगर स्थापित करें,मैं 2.7.x का उपयोग करने का सुझाव देता हूं
www.python.org/
और फिर vpython
vpython.org/
और, मेरा पसंदीदा संपादक - PyCharm
www.jetbrains.com/pycharm/
चरण 2: कोड डाउनलोड करें और चलाएं

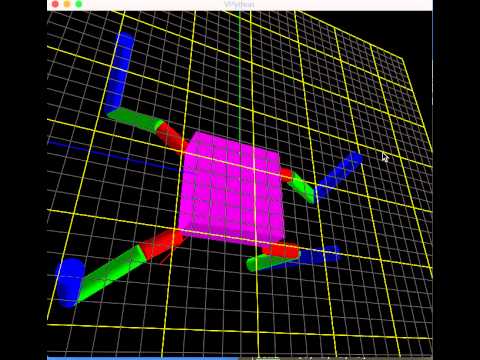
कोड डाउनलोड करें और इसे PyCharm के साथ खोलें, कोड चलाएं और आपको स्क्रीन पर एक फैंसी 3D स्पाइडर रोबोट दिखाई देगा, और आप मध्य बटन के साथ माउस का उपयोग ज़ूम इन / आउट करने के लिए कर सकते हैं, घुमाने के लिए दायां बटन।
चरण 3: इस सिम्युलेटर में अपने कार्यों को विकसित करें
यह मजेदार होगा यदि आप और अधिक रोचक क्रियाएं विकसित कर सकते हैं और मुझे साझा कर सकते हैं।
चरण 4: रियल स्पाइडर रोबोट को रिमोट कंट्रोल
पाइथन सोचा ब्लूटूथ द्वारा असली रोबोट को नियंत्रित करने के बारे में कैसे? आप पहले से ही कोशिश करना चाहेंगे। अगर किसी को इसकी आवश्यकता होगी तो मैं इसे बाद में पोस्ट करूंगा।
सिफारिश की:
"माइल्स" चौगुनी स्पाइडर रोबोट: 5 कदम

"माइल्स" क्वाड्रुपेड स्पाइडर रोबोट: अरुडिनो नैनो पर आधारित, माइल्स एक स्पाइडर रोबोट है जो चलने और पैंतरेबाज़ी करने के लिए अपने 4 पैरों का उपयोग करता है। यह पैरों के लिए एक्चुएटर के रूप में 8 SG90 / MG90 सर्वो मोटर्स का उपयोग करता है, इसमें एक कस्टम पीसीबी होता है जो सर्वो और Arduino नैनो को नियंत्रित करने और नियंत्रित करने के लिए बनाया जाता है। PCB ने समर्पित
चौगुनी स्पाइडर रोबोट - GC_MK1: 8 कदम (चित्रों के साथ)
")
चौगुना स्पाइडर रोबोट - GC_MK1: स्पाइडर रोबोट उर्फ GC_MK1 आगे और पीछे चलता है और Arduino पर लोड किए गए कोड के आधार पर नृत्य भी कर सकता है। रोबोट 12 माइक्रो सर्वो मोटर्स (SG90) का उपयोग करता है; प्रत्येक पैर के लिए 3. सर्वो मोटर्स को नियंत्रित करने के लिए इस्तेमाल किया जाने वाला नियंत्रक एक Arduino Nan
फ्लाईस्की ट्रांसमीटर को किसी भी पीसी सिम्युलेटर से कैसे कनेक्ट करें (क्लियर व्यू आरसी सिम्युलेटर) -- बिना केबल के: 6 कदम
 -- बिना केबल के: 6 कदम")
फ्लाईस्की ट्रांसमीटर को किसी भी पीसी सिम्युलेटर से कैसे कनेक्ट करें (क्लियर व्यू आरसी सिम्युलेटर) || बिना केबल के: विंग एयरक्राफ्ट के शुरुआती लोगों के लिए उड़ान का अनुकरण करने के लिए फ्लाईस्की I6 को कंप्यूटर से जोड़ने के लिए गाइड। फ्लाईस्की आई 6 और अरुडिनो का उपयोग करके उड़ान सिमुलेशन कनेक्शन को सिमुलेशन केबल्स के उपयोग की आवश्यकता नहीं है
[DIY] स्पाइडर रोबोट (क्वाड रोबोट, चौगुनी): १४ कदम (चित्रों के साथ)
![[DIY] स्पाइडर रोबोट (क्वाड रोबोट, चौगुनी): १४ कदम (चित्रों के साथ)](https://i.howwhatproduce.com/images/001/image-1641-34-j.webp "[DIY] स्पाइडर रोबोट (क्वाड रोबोट, चौगुनी): १४ कदम (चित्रों के साथ)")
[DIY] स्पाइडर रोबोट (क्वाड रोबोट, चौगुनी): यदि आपको मुझसे अतिरिक्त सहायता की आवश्यकता है, तो बेहतर होगा कि मुझे कुछ उपयुक्त दान करें: http://paypal.me/RegisHsu2019-10-10 अपडेट: नया कंपाइलर फ्लोटिंग नंबर गणना समस्या का कारण होगा। मैंने पहले ही कोड को संशोधित कर दिया है। 2017-03-26
ARDUINO स्पाइडर रोबोट (चौगुनी): 7 कदम
: 7 कदम")
ARDUINO SPIDER ROBOT (QUADRUPED): अरे दोस्तों! इस तरह के सुपर अद्भुत इलेक्ट्रॉनिक प्रोजेक्ट बनाते समय आपका मार्गदर्शन करने के लिए यहां एक नया ट्यूटोरियल है जो "क्रॉलर रोबोट" "स्पाइडर रोबोट" के रूप में भी जाना जाता है आप एक "चौगुनी रोबोट" हैं। चूंकि हर शरीर नहीं