विषयसूची:
- चरण 1: STM32CUBEMX स्थापित करें और STM32L476 के लिए पैकेज के साथ कील स्थापित करें।
- चरण 2: अपनी परियोजना के लिए इलेक्ट्रॉनिक्स इंटरफेसिंग बनाएं
- चरण 3: STM32CUBEMX में माइक्रोकंट्रोलर का चयन
- चरण 4: इस ट्यूटोरियल में दिखाए गए चित्रों के अनुसार STM32cubemx में आवश्यक चयन करें
- चरण 5: UVision Keil के लिए कोड जनरेट करें।
- चरण 6: एलसीडी के लिए Main.c फ़ाइल में कोड लिखें। इस चरण का उपयोग केवल STM32L4 और STM32L0 माइक्रोकंट्रोलर के लिए करें। अन्य माइक्रोकंट्रोलर के लिए अपने स्वयं के कोड का उपयोग करें।
- चरण 7: कोड को लूप इनसाइड मेन.सी फाइल में लिखें। संलग्न फाइल का संदर्भ लें
- चरण 8: STM32L4xx_it.c फ़ाइल में कोड लिखें Keil
- चरण 9: दोनों फाइलों में वेरिएबल जोड़ें।
- चरण 10: Uvision Keil में प्रोजेक्ट मेनू से सबमेनू एप्लिकेशन / उपयोगकर्ता पर जाएं।
- चरण 11: अपना कोड संकलित करें।
- चरण 12: बोर्ड को माइक्रोकंट्रोलर के साथ प्रोग्राम करें।

वीडियो: STM32 न्यूक्लियो बोर्ड के साथ रोटरी एनकोडर: 12 कदम

2024 लेखक: John Day | [email protected]. अंतिम बार संशोधित: 2024-01-30 09:21

यह रोटरी एनकोडर की स्थिति प्राप्त करने के लिए ट्यूटोरियल है, जो एक वृद्धिशील प्रकार का एन्कोडर है। एन्कोडर आम तौर पर दो प्रकार के होते हैं: - एक वृद्धिशील दूसरा पूर्ण होता है। इस कोड का उपयोग STM32L476 और STM32L0 माइक्रोकंट्रोलर के लिए किया जा सकता है। लेकिन यदि आपके पास अपना स्वयं का है एलसीडी लाइब्रेरी या एलसीडी के लिए कोड यह किसी भी एसटीएम 32 माइक्रोकंट्रोलर के लिए काम करेगा।
मैं इस ट्यूटोरियल के लिए STM32L476 न्यूक्लियो बोर्ड का उपयोग कर रहा हूं।
आप एन्कोडर की गति के अनुसार कोड लिखकर STEPPER मोटर या सर्वो मोटर जैसी मोटरों को नियंत्रित कर सकते हैं। मैंने ऐसा कोड पहले ही लिखा है। कृपया आगे के लिए मेरे ट्यूटोरियल देखते रहें।
चरण 1: STM32CUBEMX स्थापित करें और STM32L476 के लिए पैकेज के साथ कील स्थापित करें।
चरण 2: अपनी परियोजना के लिए इलेक्ट्रॉनिक्स इंटरफेसिंग बनाएं
इस परियोजना के लिए आवश्यक इलेक्ट्रॉनिक्स घटक हैं: -
1)16x2 अल्फ़ान्यूमेरिक एलसीडी 2) STM32L476 न्यूक्लियो बोर्ड। 3) ब्रेड बोर्ड 4) जम्पर तार। 5) विंडोज़ के साथ एक लैपटॉप स्थापित (6) रोटरी एनकोडर। LCD और STM32L476 बोर्ड का कनेक्शन नीचे दिया गया है:-
STM32L476 - एलसीडी
जीएनडी - पिन1
5वी - पिन2
NA - 2.2K रोकनेवाला GND. से जुड़ा है
PB10 - RS
PB11 - RW
PB2 - EN
PB12 - D4
PB13 - D5
PB14 - D6
PB15 - D7
5वी - पिन15
जीएनडी - पिन16
रोटरी एनकोडर और STM32 का कनेक्शन नीचे है
रोटरी एनकोडर-एसटीएम बोर्ड
पावर पिन-3.3 वी
जीएनडी-जीएनडी
सीएलके-पीसी१
डीटी-पीसी0
चरण 3: STM32CUBEMX में माइक्रोकंट्रोलर का चयन
क्यूबमेक्स खोलें और STM32L476. के रूप में माइक्रोकंट्रोलर के साथ न्यूक्लियो64 बोर्ड चुनें
चरण 4: इस ट्यूटोरियल में दिखाए गए चित्रों के अनुसार STM32cubemx में आवश्यक चयन करें



STM32Cubemx में आवश्यक चयन करने के लिए उपरोक्त चरणों का उपयोग करें, और उस माइक्रोकंट्रोलर के लिए अधिकतम घड़ी चुनें जिसका आप उपयोग कर रहे हैं (STM32L476 मैं इस ट्यूटोरियल में उपयोग कर रहा हूं)
चरण 5: UVision Keil के लिए कोड जनरेट करें।
चरण 6: एलसीडी के लिए Main.c फ़ाइल में कोड लिखें। इस चरण का उपयोग केवल STM32L4 और STM32L0 माइक्रोकंट्रोलर के लिए करें। अन्य माइक्रोकंट्रोलर के लिए अपने स्वयं के कोड का उपयोग करें।

परियोजनाओं से main.c फ़ाइल खोलें, Keil का मेनू और मुख्य के लूप से पहले LCD आरंभीकरण के लिए कोड लिखें। संलग्न चित्र देखें।
चरण 7: कोड को लूप इनसाइड मेन.सी फाइल में लिखें। संलग्न फाइल का संदर्भ लें

चरण 8: STM32L4xx_it.c फ़ाइल में कोड लिखें Keil

Keil में STM32L4xx_it.c फ़ाइल में कोड लिखें। संलग्न फ़ाइल में कोड देखें।
चरण 9: दोनों फाइलों में वेरिएबल जोड़ें।


दोनों फाइलों में चर जोड़ें। संलग्न फाइल देखें।
चरण 10: Uvision Keil में प्रोजेक्ट मेनू से सबमेनू एप्लिकेशन / उपयोगकर्ता पर जाएं।
uvision में प्रोजेक्ट मेनू से Keil सबमेनू एप्लिकेशन/उपयोगकर्ता पर जाएं। LCD_hd44780_stml4xx.c फ़ाइल संलग्न करें (सबमेनू पर राइट क्लिक करें और ब्राउज़ विकल्प पर जाएं और तीन LCD फ़ाइलों को keil के स्रोत फ़ोल्डर में कॉपी करने के बाद फ़ाइल संलग्न करें।)
चरण 11: अपना कोड संकलित करें।
यदि कोई त्रुटि आती है तो कोड संकलित करें और डीबग करें।
चरण 12: बोर्ड को माइक्रोकंट्रोलर के साथ प्रोग्राम करें।
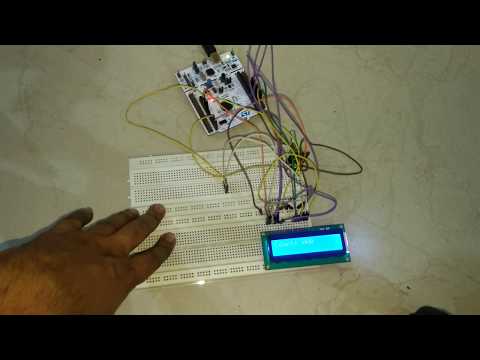
बोर्ड को माइक्रोकंट्रोलर से प्रोग्राम करें। इस वीडियो की तरह आउटपुट मिलेगा।
सिफारिश की:
Arduino और रोटरी एनकोडर के साथ टाइमर: 5 कदम

Arduino और रोटरी एनकोडर के साथ टाइमर: टाइमर एक उपकरण है जिसका उपयोग अक्सर औद्योगिक और घरेलू दोनों गतिविधियों में किया जाता है। यह असेंबली सस्ती और बनाने में आसान है। यह बहुत बहुमुखी भी है, जो जरूरतों के अनुसार चुने गए प्रोग्राम को लोड करने में सक्षम है। मेरे द्वारा लिखे गए कई कार्यक्रम हैं, अर्दुई के लिए
Arduino और रोटरी एनकोडर के साथ पावर टाइमर: 7 कदम (चित्रों के साथ)
")
Arduino और रोटरी एनकोडर के साथ पावर टाइमर: यह पावर टाइमर यहां प्रस्तुत टाइमर पर आधारित है:https://www.instructables.com/id/Timer-With-Arduin…एक बिजली आपूर्ति मॉड्यूल और एक SSR (सॉलिड स्टेट रिले) ) से जुड़े थे। 1KW तक के पावर लोड को संचालित किया जा सकता है और न्यूनतम परिवर्तनों के साथ l
रोटरी एनकोडर के रूप में स्टेपर मोटर का उपयोग करें: 9 कदम (चित्रों के साथ)
")
रोटरी एनकोडर के रूप में स्टेपर मोटर का उपयोग करें: माइक्रोकंट्रोलर परियोजनाओं में इनपुट डिवाइस के रूप में उपयोग के लिए रोटरी एन्कोडर बहुत अच्छे हैं लेकिन उनका प्रदर्शन बहुत सहज और संतोषजनक नहीं है। इसके अलावा, बहुत सारे स्पेयर स्टेपर मोटर्स होने के कारण, मैंने उन्हें एक उद्देश्य देने का फैसला किया। तो अगर कुछ स्टेपर है
स्टेपर मोटर नियंत्रित मॉडल लोकोमोटिव - स्टेपर मोटर एक रोटरी एनकोडर के रूप में: 11 कदम (चित्रों के साथ)
")
स्टेपर मोटर नियंत्रित मॉडल लोकोमोटिव | रोटरी एनकोडर के रूप में स्टेपर मोटर: पिछले निर्देशों में से एक में, हमने सीखा कि स्टेपर मोटर को रोटरी एन्कोडर के रूप में कैसे उपयोग किया जाए। इस परियोजना में, अब हम एक Arduino माइक्रोकंट्रोलर का उपयोग करके एक मॉडल लोकोमोटिव को नियंत्रित करने के लिए स्टेपर मोटर से बने रोटरी एन्कोडर का उपयोग करेंगे। तो, फू के बिना
स्टेपर मोटर नियंत्रित स्टेपर मोटर - स्टेपर मोटर एक रोटरी एनकोडर के रूप में: 11 कदम (चित्रों के साथ)
")
स्टेपर मोटर नियंत्रित स्टेपर मोटर | स्टेपर मोटर एक रोटरी एनकोडर के रूप में: क्या कुछ स्टेपर मोटर्स चारों ओर पड़ी हैं और कुछ करना चाहते हैं? इस निर्देशयोग्य में, एक Arduino माइक्रोकंट्रोलर का उपयोग करके एक अन्य स्टेपर मोटर की स्थिति को नियंत्रित करने के लिए एक स्टेपर मोटर को रोटरी एन्कोडर के रूप में उपयोग करें। तो बिना ज्यादा देर किए, आइए जानते हैं